ABH3c Series는 배터리 전원 구동에 대응하며 속도, Torque 제어용 AC SERVO DRIVER 2축 분을 일체화한 AC SERVO
DRIVER입니다. SERVO DRIVER 2축을 조합한 제어기능을 탑재 함으로서 AGV 등의 주행부 용으로 최적의 제품을 완성하였습니다. 다양한 제어 방법에 대응, PLC의 전환 제어에서도 유연한 제어가 가능하게 되었습니다.
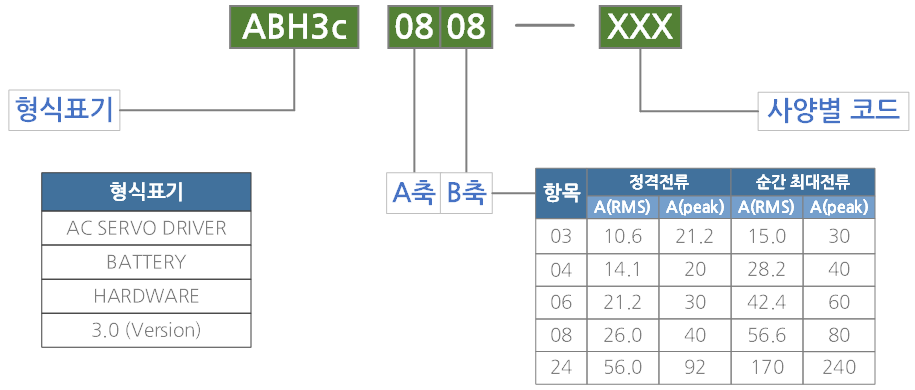
◎ 형식 및 표기 : TYPE
◎ ABH3c Series 사양
(모바일은 가로 뷰로 전환해 주세요) Driever Model ABH3c-0303 ABH3c-0404 ABH3c-0606 ABH3c-0808 ABH3c-2424 24V Motor 정격 용량 165 W (Max) 165 W (Max) 300 W (Max) 370 W / 377 W (Max) - 48V Motor 정격 용량 - 400 W (Max) 750 W (Max) - 2.2kW (Max) 정격 상 전류 21.2 [A] 20 [A] 30 [A] 40 [A] 92 [A] 순간 최대 전류 30.0 [A] 40 [A] 60 [A] 80 [A] 240 [A] 중 량 0.9 kg 2 kg 2.3 kg 2.6 kg 6.0 kg 사이즈 W,H,D (※1) W:29.8/H:153/D:150 mm W:53/H:215/D:183 mm W:65/H:215/D:183 mm W:78/H:215/D:183 mm W:160/H:215/D:183 mm 냉각방식 Heat sink
자연 공냉 (두께 5mm)Heat sink
자연 공냉 (두께 5mm)Heat sink
자연 공냉 (두께 17mm)Heat sink
자연 공냉 (두께 30mm)DC Fan 강제 공냉 Overdrive 200 [%] 260 [%] 제어 전원
주 전원정격 전압 DC 24 [V] DC 24 [V] ~ DC 48 [V] 동작 보증 DC 18 [V] ~ DC 30 [V] DC 20 [V] ~ DC 60 [V] Power 제어 방식 Power MOSFET에 의한 3상 정현 파 PWM 사용 환경 동작 온도 0~45℃/습도 85% Rh 이하
(상세 스펙은 업로드된 자료를 확인해 주세요)
◎ 호환 및 권장 모터
형식 특징 비고 AWR030B-D408 일체형 감속기 휠 사용, 브레이크 및 레졸버 기본 장착 바로가기 AWR030B-C908 일체형 감속기 휠 사용, 브레이크 및 레졸버 기본 장착 바로가기
◎ ABH3c Series 드라이버 특징
■ 소형화되고, 확장된 CAN 통신
기존의 ABH3 사양의 I/O Connector에 의한 Motor의 구동제어나 상태 모니터를 CAN 통신으로 옮길 수 있습니다. ABH3는 Slave 기기로서 CAN 버스에 접속해서 Host 기기와의 통신이나 CAN 버스에서 접속되어 있는 별도의 ABH3와 Data 공유에 의해 구동제어가 가능합니다.■ CAN 통신의 신호 입력■ CAN 통신을 통하여 Data 불러오기ABH3c의 표준 기능으로서 I/O Connector의 입력신호로 조작된 각종 제어 상태를 Host 기기에 조작 플래그로서 설정할 수 있습니다.ABH3c는 디지털 입력 설정에 의해 입력신호 상태(할당할 수 있는 디지털 입력신호 논리 또는 ON|OFF의 고정논리)를 입력 플래그로 하고 Host 기기에서의 조작 플래그와의 논리연산에 의해 제어 플래그가 설정되어서 Driver의 제어 상태를 반영합니다. 논리연산은 Driver Parameter로 신호 기능마다 OR와 AND로 선택할 수 있고 초기설정은 모두 OR입니다. 이로 인해 ABH3c의 출하 초기설정은 CAN 통신 조작 플래그와 Driver 입력신호의 OR 조건에서 제어신호가 설정되고 Driver 입력신호를 배선하지 않으면 CAN 통신만으로 조작이 가능합니다.신호 기능으로 AND가 설정된 경우 입력 플래그와 조작 플래그가 함께 “1”일때에 해당하는 제어 플래그가 설정되기 위해 외부 신호 입력을 Interlock 등의 조건 입력으로써 사용할 수 있습니다.
ABH3c의 입출력 신호 상태를 포함해서 Driver의 제어 플래그나 내부 Data를 불러낼 수 있습니다.
ABH3에서는 Host 기기에서의 Single Pocket 및 리퀘스트 Pocket에 대한 응답 송신과 송신 방식 Parameter의 주기 설정에 의해 정주기 송신을 실행합니다. Host 기기 간의 Single Pocket 통신은 지령 값에 대응한 귀환 값과 제어 플래그를 송신합니다. Broadcast 통신은 Driver의 내부 플래그나 각종 제어 값을 송신합니다.
■ CAN 통신 Time Out
Host에서의 CAN 통신에 의해 구동제어에서 CAN 버스나 지령 송신원 기기의 트러블에 의해 Data 갱신이 정지된 경우에 경고 또는 이상의 Time Out 판정이 됩니다.[Time Out 판정의 대상]①CAN 통신에 의한 구동 지령②조작 플레그에 의한 구동제어를 Parameter에 의해 선택합니다.
■ 내부 지령 확장
DRIVER 내부에 7종류의 속도(Torque) 지령과 외부 입력을 I/O로 변환이 가능하며 7종류의 설정에는 가속도, 감속도 SERVO GIN도 동시에 설정이 가능합니다.PLC의 변환 제어로 유연한 지령 전환이 가능하게 되었습니다.
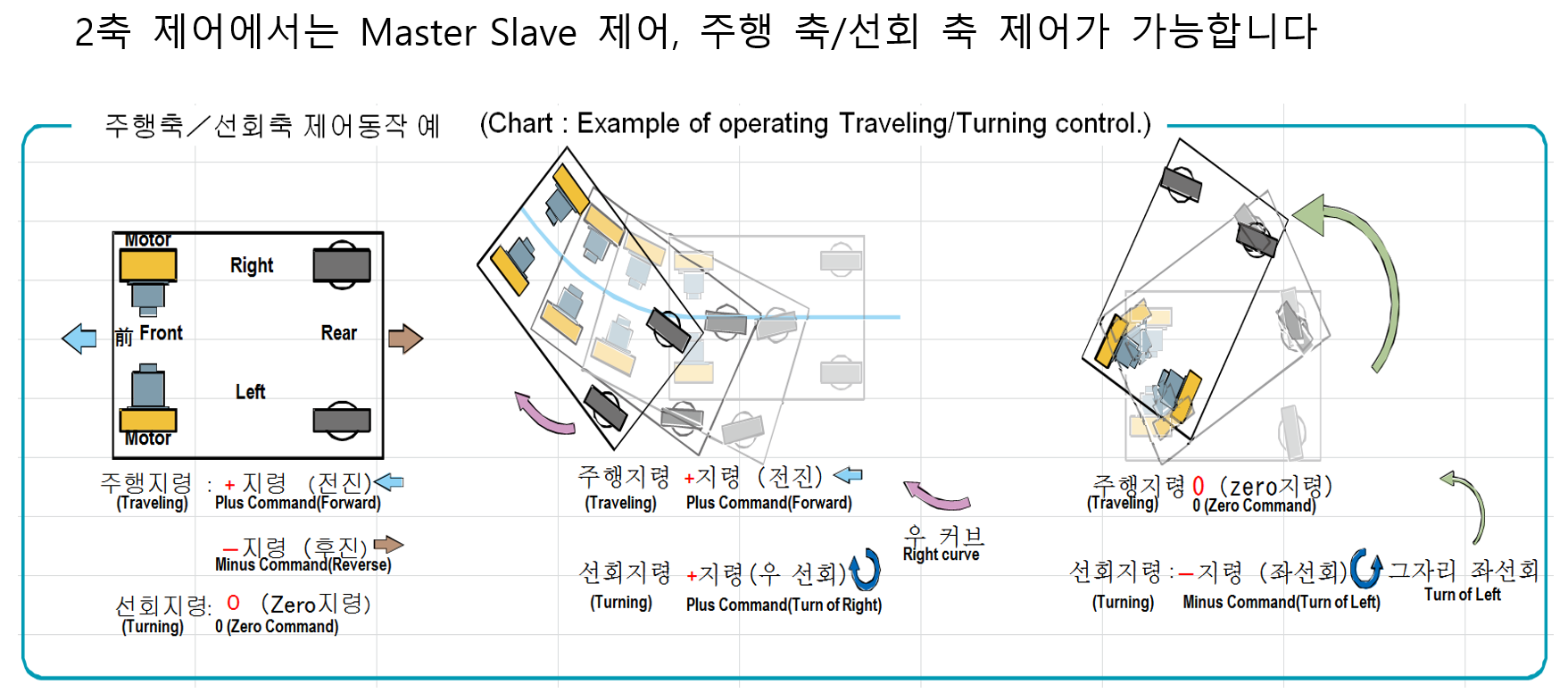
■ 다양한 지령 방법에 대응
주행 축/선회 축 제어가 가능하며 2축 제어에서는 Master Slave 제어, 주행 축/선회 축 제어가 가능합니다.■ 유연하게 대응할 수 있는 I/O 할당 기능
접속은 ABH2와 호환성 확보, 기기와의 교환도 자연스럽게 실행 가능합니다. I/O 입, 출력 Connector의 제어 신호 Pin은 범용 입력, 출력으로 설정, 각각의 단자에 내부 기능을 Tool Soft에서 할당이 가능합니다. 미 사용 신호는 내부 설정에서 할당하지 않고 그 상태를 고정할 수 있습니다. 1개의 단자에 복수의 기능을 동시에 설정하는 것이 가능하므로 배선 수를 줄일 수 있고, 논리 변경 등을 유연하게 할 수 있습니다.
| 제어 방법 | |||
| 제어 축 | A/B 축 | Motor 별 독립 제어 | |
| 주행/선회 축 | Motor Feedback을 합성한 구동 축 제어 | ||
| 제어 모드 |
속도/Torque 제어 | 제어별 설정이 가능 | |
| Master/Slave | A/B 축 제어에서 유효, Master 축을 속도제어, Slave 축을 Torque 제어로 하여 Master 축의 속도제어 출력(Torque 지령)을 Slave 지령에 분배 | ||
속도제어 출력(Torque 지령)을 Slave 지령에 분배 | |||
| 지령 입력 | |||
| 아날로그 전압 입력 |
Bipolar 입력(±10[V]) Unipolar 입력(±0~5[V] : 2.5[V] Center | ||
| 내부 지령 |
8 Groups 등록, 제어 입력으로 Groups 선택 실행 | ||
| 지령 계산 | |||
| 가속, 감속 제어 | Acceleration/Deceleration을 개별적으로 설정가능 | ||
S자 가속, 감속 계산도 가능 | |||
| 극성 전환 |
| ||
| 보정 계산 | |||
| 제어 신호 I/O | |||
| 입 력 | 전용 입력 1점/범용 입력 20점 | ||
| 출 력 | Error 출력 1점, Alarm 출력 1점, Code 출력 4점으로 경고, 이상 상태를 출력 | ||
Ready 출력 1점, Busy 출력 1점, 모든 출력 8점을 Parameter에서 재설정 가능 | |||
| 기타 기능 | |||
| 통신 기능 | 통신 Port USB Serial/RS232C 탑재 | ||
| Encoder 출력 | Motor 별로 Encoder Pulse 출력이 가능(Pulse 수 설정도 가능) | ||
| Brake 출력 | Motor Brake 접속 단자 탑재 | ||
| Parameter 보존 | Parameter는 FLASH 메모리에 보존 | ||